Robot Omncyfeiriad RXR-C360D-2 3.0



RXR-C360D-2Robot Omncyfeiriad3.0
| Cefndir cynnyrch: Mae ymchwiliadau mewn mannau peryglus, cul ac isel bob amser wedi bod yn hynod bwysig ar gyfer ymchwiliadau gwrthderfysgaeth ac archwiliadau diogelwch.Ar hyn o bryd, mae arolygiadau diogelwch gwrthderfysgaeth hefyd yn mabwysiadu arolygiadau canolog gan bobl.Mae'r dull arolygu hwn yn cymryd llawer o amser ac yn llafurddwys.Gall robotiaid di-griw gwblhau ochr isaf y cerbyd yn effeithiol.Mae'r gwaith arolygu mewn meysydd cymhleth fel tai a chynwysyddion yn lleihau costau llafur ac yn cyflawni arolygu a dileu dangosyddion gweithrediad peryglus yn effeithiol.Yn rhagchwilio mewnol, gweithredu archwiliad siasi cerbyd achub gwystl mewn ardaloedd cul a gweithrediadau eraill, ni all y personél gweithredu basio, gan arwain at gaffael gwybodaeth annhymig ac anghywir, ac mae'n hawdd oedi gwybodaeth bwysig.Gall robotiaid di-griw reoli piblinellau, mannau cul, a cherbydau yn ôl gwahanol amgylcheddau.Rhagchwilio a chaffael gwybodaeth bwysig mewn mannau fel y siasi. Mae ein cwmni bob amser wedi cadw at dechnoleg ymchwilio di-griw ac wedi cyflwyno cynhyrchion ymchwilio di-griw newydd yn barhaus. Mae'r robot omnidirectional RXR-C360D-2 yn mabwysiadu gyriant olwyn Mecanum, gweithrediad hyblyg, symudiad omnidirectional, cyflymder cyflym, a maint bach, a all fodloni'r gofynion canfod ar gyfer mannau cul ac isel peryglus. |
| 1.Pdisgrifiad roduct |
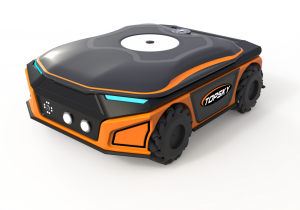
| Mae robot omnidirectional RXR-C360D-2 yn robot arolygu bach gyda chyfaint bach ac ymddangosiad gwastad.Fe'i defnyddir yn bennaf ar gyfer archwiliadau mewn mannau cul ac isel.Gellir ei ehangu hefyd i lwytho modiwlau synhwyrydd amrywiol i ganfod yr ardal darged.Mae olwyn yrru'r robot yn mabwysiadu'r dyluniad strwythur olwyn mecanwm, sydd â gallu symudiad cyfieithu mewn unrhyw gyfeiriad ac ongl, symudiad hyblyg a gweithrediad cyfleus.Mae'r robot wedi'i lwytho â system fideo sianel ddeuol ar gyfer gyrru a gwirio, ac mae ganddo swyddogaeth trosglwyddo delwedd amser real.Ar yr un pryd, gall y radar osgoi rhwystrau ymlaen atal y robot rhag taro rhwystrau a gwella diogelwch defnydd;mae'r rheolydd yn fach ac yn ysgafn, gydag integreiddio uchel, ac mae ganddo swyddogaethau rheoli robot a chaffael delwedd.Dyma'r robot archwilio gofod cul ac isel proffesiynol llawn-swyddogaeth ar y farchnad. |
| 2.Cwmpas y cais |
| lArchwiliad siasi cerbyd lArchwiliad o waelod cynwysyddion mawr, silffoedd a chynwysyddion lArchwilio gwaelod byrddau a chadeiriau mewn lleoliadau cynadledda lArchwilio gwahanol fannau cul eraill lArchwilio ardaloedd peryglus |
| 3.Nodweddion |
| 1. ★symud omni-gyfeiriadol Cyflym Mae'r cynnyrch hwn yn defnyddio olwynion mecanum, sy'n gallu symud i bob cyfeiriad, llywio hyblyg, ac yn hawdd i'w gweithredu.Gall y cyflymder uchaf gyrraedd 1.5m / s, a all gyrraedd yr ardal ganfod yn gyflym ac arbed amser. 2. ★ Rhagchwilio gofod bach Mae'r cynnyrch hwn yn fach o ran maint a gall ganfod ardaloedd bach ac isel sy'n anghyfleus i bersonél arsylwi.Gall lens golwg uchaf y corff car archwilio siasi'r car.Gall y radar osgoi rhwystrau ar flaen y corff car osgoi rhwystrau. 3.★ Chwilio ac Achub Gall y cynnyrch hwn gyrraedd a chwilio'n gyflym am ardaloedd peryglus ac ardaloedd sy'n anghyfleus i bobl fynd i mewn iddynt.Gall camerâu gweledigaeth nos blaen a chefn y corff car wneud i'r cynnyrch weithio yn y nos a gwella effeithlonrwydd chwilio ac achub. 4. ★Portable gwrth-gwrthdrawiad Mae gan y robot omnidirectional gamera a radar osgoi rhwystrau i'r cyfeiriad ymlaen, a chamera a dyfais gwrth-wrthdrawiad yn y cyfeiriad yn ôl, sy'n dod â diogelwch uwch i'r cynnyrch. |
| 4.Prif Fanylebau |
| 4.1 Paramedrau corff robot: 1. Foltedd gweithio: 12V 2.★ Cyflymder symud uchaf: ≥1.5m/s 3.★ Amser gweithio: ≥4h 4.★Pellter rheoli: ≥60m 5. ★Load pwysau: ≥3kg 6.★Uchafswm ongl dringo: ≥15 ° 7.★Uchafswm uchder croesi rhwystr: ≥20mm 8. Gellir disodli'r batri: ie 9. System goleuo: goleuadau LED × 8 uchel-disgleirdeb 4.2 Paramedrau rheoli o bell: 1. sgrin arddangos: arddangosfa uchel-disgleirdeb 7-modfedd 2. gweithredu handlen: gweithrediad ffon reoli deuol 3. ★Batri bywyd amser: ≥4h 4. ★Wireless rheoli o bell pellter: ≥60m 4.3 Paramedrau trosglwyddo delwedd: 1. ★Image trosglwyddo pellter: ≥60m 2.★Driving camera: lens gweledigaeth nos blaen a chefn + lens golwg uchaf, gellir newid y sgrin |